











Nissan Juke 2024 Manuels d’utilisation
7.22.1.3. Limites du système AEB

Les limites du système AEB sont indiquées ci-dessous. Ne pas tenir compte de ces limites pendant la conduite du véhicule pourrait entraîner de graves blessures ou la mort.
Le système AEB ne peut pas détecter tous les véhicules, piétons et cyclistes dans toutes les conditions.
Le système AEB ne détecte pas les objets suivants :
Les piétons de petite taille (y compris les petits enfants) et les animaux.
Les piétons en fauteuil roulant ou utilisant un moyen de transport mobile comme les scooters, les jouets actionnés par des enfants, ou les skateboards.
Les piétons qui sont assis ou qui ne sont pas dans une position debout complètement verticale ou qui sont en train de marcher.
Les véhicules roulant en sens inverse.
Les véhicules qui traversent.
Les obstacles au bord de la route.
Les performance du système AEB sont limitées.
Si un véhicule est à l'arrêt sur la trajectoire du véhicule, le système AEB ne fonctionne pas lorsque le véhicule roule à une vitesse supérieure à environ 80 km/h (50 MPH).
Pour la détection des piétons et cyclistes, le système AEB ne fonctionne pas lorsque le véhicule roule à des vitesses supérieures à environ 80 km/h (50 MPH) ou inférieures à environ 10 km/h (6 MPH).
Le système AEB ne fonctionne pas pour les piétons et cyclistes se trouvant dans l'obscurité ou dans des tunnels, même si la zone dispose d'un éclairage public.
Le système AEB peut ne pas fonctionner si le véhicule qui précède est étroit (une moto par exemple).
Le système AEB peut ne pas fonctionner si la différence de vitesse entre les deux véhicules est trop faible.
Le système AEB peut ne pas fonctionner correctement ou ne pas détecter un véhicule, un piéton ou un cycliste situé devant dans les conditions suivantes :
Mauvaise visibilité (pluie, neige, brouillard, tempêtes de poussière, tempêtes de sable, et éclaboussures projetées par d'autres véhicules).
Conduite en descente sur une pente raide ou sur des routes très sinueuses.
Conduite sur une route cahoteuse, comme une chemin de terre irrégulier.
Si de la saleté, du givre, de la neige ou tout autre matériau recouvre la surface du capteur radar.
En cas d'interférences causées par d'autres sources radar.
La surface de la caméra du pare-brise est embuée, couverte de saleté, de gouttes d'eau, de givre, de neige, etc.
Une lumière forte (par exemple, les rayons du soleil ou les feux de route des véhicules circulant en sens inverse) pénètre dans la caméra avant. Une lumière forte provoque un obscurcissement de la zone autour du piéton ou cycliste, qui devient difficilement visible.
Un changement soudain de luminosité se produit. Par exemple, lorsque le véhicule entre ou sort d'un tunnel ou d'une zone ombragée ou que des éclairs se produisent.
Le faible contraste d'une personne par rapport à l'arrière-plan, par exemple, si la couleur ou le motif des vêtements sont semblables à l'arrière-plan.
Le profil du piéton est en partie obscurci ou n'est pas identifiable car le piéton transporte des bagages, porte des vêtements ou des accessoires volumineux ou très large.
Lorsque le système n'a jamais détecté d'obstacle depuis que le véhicule a été conduit après le démarrage du moteur.
Les performances du système peuvent se détériorer dans les conditions suivantes :
Le véhicule roule sur une route glissante.
Le véhicule roule sur une pente.
Des bagages excessivement lourds sont chargés sur le siège arrière ou dans le compartiment à bagages de votre véhicule.
Le système est conçu pour vérifier automatiquement le fonctionnement du capteur (radar et caméra), dans certaines limites. Le système peut ne pas détecter certaines formes d'obstructions au niveau de la zone du capteur, comme le givre, la neige, les autocollants, etc. Dans de tels cas, le système peut ne pas être en mesure d'alerter le conducteur correctement. Veillez à vérifier, nettoyer et dégager régulièrement la surface des capteurs.
En fonction de l'état de la route et des conditions de circulation, le système AEB peut actionner partiellement les freins de manière inattendue. Lorsqu'une accélération est nécessaire, continuez à enfoncer la pédale d'accélérateur pour désactiver le système.
Un bruit excessif peut interférer avec le témoin d'avertissement sonore. Il est possible que vous n'entendiez pas le témoin sonore.
Les distances de freinage augmentent sur les surfaces glissantes.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) peut s'activer lorsque les éléments suivants sont similaires aux contours des piétons ou cyclistes, ou s'ils ont la même taille et la même position que les feux arrière d'un véhicule ou d'une moto.
De la peinture, une ombre ou des motifs sur la route, sur le bord de la route ou sur un mur (marquages routiers ternis ou inhabituels y compris).
La forme d'une structure routière située devant (tels des tunnels, des viaducs, des panneaux de signalisation, des réflecteurs installés sur les côtés d'un véhicule, des bandes réflectives et des rails de sécurité), des objets en bordure de route (arbres, immeubles) et des sources d'éclairage.
Une forme formée par des objets situés au bord de la route, tels que des arbres, des éclairages, des ombres ou des immeubles.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) peut réagir quant aux :
objets sur le bord de la route (panneau de signalisation, rail de sécurité, piéton, cycliste, moto, véhicule, etc.)
objets au-dessus de la route (pont bas, panneau de signalisation, etc.)
objets sur le revêtement de la route (voie ferrée, grille, plaque d'acier, etc.)
objets dans un parking couvert (poutre, pilier, etc.)
piétons ou cyclistes ou motos s'approchant de la voie de circulation
véhicules, piétons, cyclistes, motos ou objets dans la voie adjacente ou à proximité du véhicule
piétons et cyclistes en approche

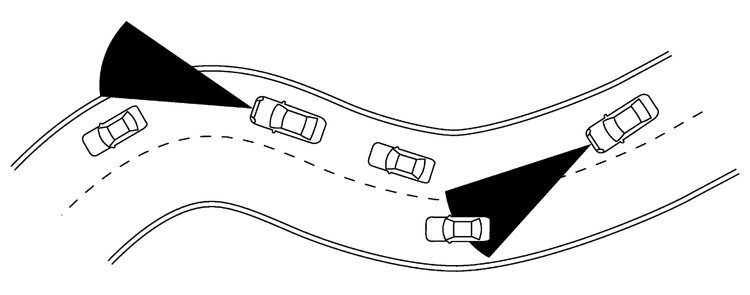
En cas de conduite sur routes sinueuses, vallonnées, en lacets, étroites ou en travaux ou lorsque vous conduisez sur une pente, il est possible que le capteur détecte des véhicules circulant dans une autre voie, ou qu'il ne détecte provisoirement pas un véhicule qui précède. Ceci peut entraîner un mauvais fonctionnement du système.
Le déplacement (manœuvre de direction ou position de circulation dans la voie, etc.) ou l'état du véhicule peuvent également affecter la détection des véhicules. Si cela se produit, le système peut vous avertir en faisant clignoter le témoin du système et en déclenchant le témoin sonore de manière inattendue. Vous devrez contrôler vous-même la distance de sécurité convenable par rapport au véhicule qui précède.